同氏らは自ら開発したPoly-Optの評価実験を実施。41mm×41mm×41mmのスタイロフォームの模型をレーザースキャンし、Poly-Optをかけている。
その結果、一般的なスケールの1/1000のスケールモデルに相当する、実測で41mmの辺長に対し、Poly-Optをかけたデータでは最大で3.13mm(7.73%)、平均で1.25mm(約3%)の誤差(range error)を確認。1/1000スケールの模型での3mmは実際の寸法の検討では3mに相当することを考えると、この誤差についてはそのマージンを小さくするなど改善していく必要があるとしている。
「(Poly-Optをツールとして)使うのに少し精度の問題が出ていますが、平均で考えると、使えるレベルに納まっているかな、と思います」
また、90度で作成された模型の角度については、法線ベクトルの値によってはブレも発生。最大3%超の角度誤差(angular error)が見られたものの、平均では0.01%と、ほぼ90度近い値で取得できていることが明らかになった。
さらに、今回研究の元々の目的でもある膨大なデータの削減という面では、Poly-Optをかけることでファイルサイズや頂点数、ポリゴン数は99%超の削減率(reduction rate)を実現。その達成率(accomplishment rate)は100%となった。しかもこれらは、立方体はもちろん、四面体あるいは2つの立方体の組み合わせのいずれのケースにおいても、非常に大きな有効性を示しているという。
「都市モデル(縮尺1/500のスケールモデル)でも同様に(データ量を)小さくすることは出来ています」
ただ、建物に凹凸がある場合は、ドロネー分割法を用いて三角形を生成していることもあり、L字型やZ字型の箇所では余分な面を生成してしまうといった課題は残っているとの考えを福田知弘氏は述べる。
同氏らは、延長約2kmの仮想の道路プロジェクトを設定。別途作成した都市モデルを、VRML形式から3DS形式に変換して3Dリアルタイムソフト「UC-win/Road」にローディング。「実際にはこれほど大きなモデルではないのですが、今回は100倍に拡大して都市に近い表現にしています」
これを受けて、実際に3Dレーザースキャナーで取ったデータをそのままポリゴン化して読み込んだものと、それにPoly-Optをかけてすべてフラットな面を生成したモデルを対比。後者ではスムーズな表現が可能になった一方、ポリゴン数は約98%の削減率を実現。併せて、最適化したデータのftpは非常に高い値を得られたとしている。
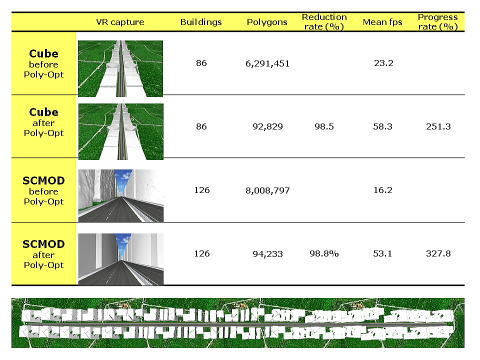 |
| UC-win/Roadで作成したbmp(ビットマップ)ファイルを使った比較測定 Comparison Measurement by using UC-win/Road.bmp (画像は福田 知弘 氏 提供/(有)ライティング・ソリューションズ 訳) (Images provided by Tomohiro Fukuda/Translated by WritingSolutions Ltd.)) |