その結果、前述のように、例えば立方体をつくるのにCADであれば頂点数が8、ポリゴン数が12で済むのに対し、3Dレーザースキャナーで計測すると1万以上の頂点および2万以上のポリゴンという必要以上のデータ量が生成され得る。
加えて、エッジに目を転じれば、フラットな面を正確に再現できず、階段状にギザギザした形状を来すことになる。しかも、スキャニングし切れない場所についてはポリゴンが欠落してしまうといった制約もあった。
これらの問題に対するソリューションとして同氏らは、スキャンデータを自動的に最適化するシステム「Poly-Opt」の開発を目指すこととした。
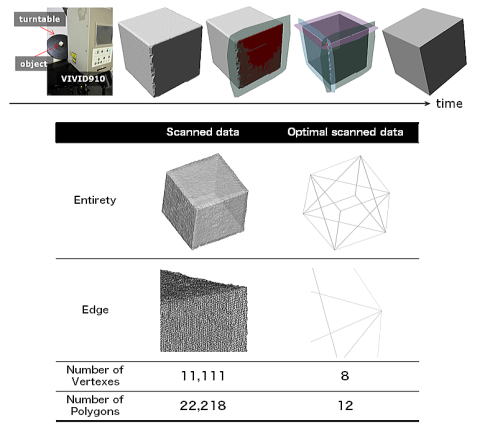 |
Poly-Optの流れのイメージと、Poly-Optを使ったリダクションの結果
Images of the Poly-Opt flow and Result of reduction by using Poly-Opt
(画像は福田 知弘 氏 提供/(有)ライティング・ソリューションズ 訳)
(Images provided by Tomohiro Fukuda/Translated by WritingSolutions Ltd.)
|
Exploring New Trends: Information-oriented Strategy and Technologies in
Civil Engineering, Construction, Transportation and Environment
都市デザイン研究における
3DレーザースキャナーデータからVRデータへの最適化システム
Development of Optimizing System
from 3D Laser Scanner Data to VR for Urban Design Study
Poly-Opt用いたモデリング
「3Dレーザースキャナーから取った(オリジナルの)データは(同スキャナーの)カメラを基準とした座標系になっているため、これらをまずXYZの座標軸に行列で変換。その上で、法線ベクトルを集め、一つの平面を計算します」
スキャンデータの座標軸は、Z軸がスキャン対象の模型から同スキャナーに向き合う方向で設定されるため、実際の空間の垂直・水平関係とは異なる。そこで、VRの編集がしやすくなるように座標軸を変換する。
次いで、スキャンデータの各表面を含む形で複数の面を生成。それらの面ごとに連立方程式を計算することにより、オブジェクトのエッジとなる頂点が決定。その過程では、法線ベクトルの角度をどこまで許容するか設定したり、建物を一体のオブジェクトとしてではなく個別の建物として生成しPoly-Optをかけたり、余白の領域(codomain)を設けたり、といった試みも実施している。
そして最終的には、頂点群を生成した後、それらをドロネー三角形分割法(Delaunay triangulation method)により結合することでポリゴンをつくっていく。
福田知弘氏は、シンプルなモデルを再生成する、Poly-Optを用いたVRモデリングの流れについて、こう描く。
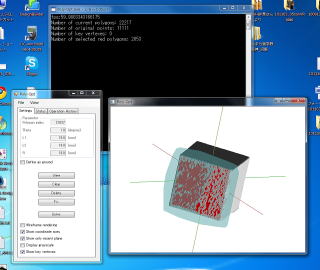 |
Poly-OptのGUI(Graphical User Interface)
GUI of Poly-Opt
(画像は福田 知弘 氏 提供/(有)ライティング・ソリューションズ 訳)
(Images provided by Tomohiro Fukuda/Translated by WritingSolutions Ltd.)
|
次いで、実際に開発したPoly-Optをデモンストレーション。Poly-OptのインターフェースからVRMLのファイルを読み込み、最適化する面のポリゴンを抽出してフィックス。そうしたプロセスを、立方体を構成する6面に対して行っていく。6面の頂点が生成されると、赤くポイントが表示され、「solve」ボタンを押すと、自動的に計算。テクスチャ付きの簡単なモデルが生成される様子を再現した。
掲載記事・写真・図表などの違法な無断転載を禁じます。
Copyright©2011 The WrightingSolutions Ltd. (http://www.wsolutionsjp.com/) All rights reserved.